짐벌 작동 테스트를 위하여 Autodesk 사의 Inventor라는 프로그램을 이용하여 짐벌의 프레임을 3D 모델링하였다.

GBM3506H-130T의 3D 모델링 파일을 구하여 모터에 맞게 모델링을 하였다.
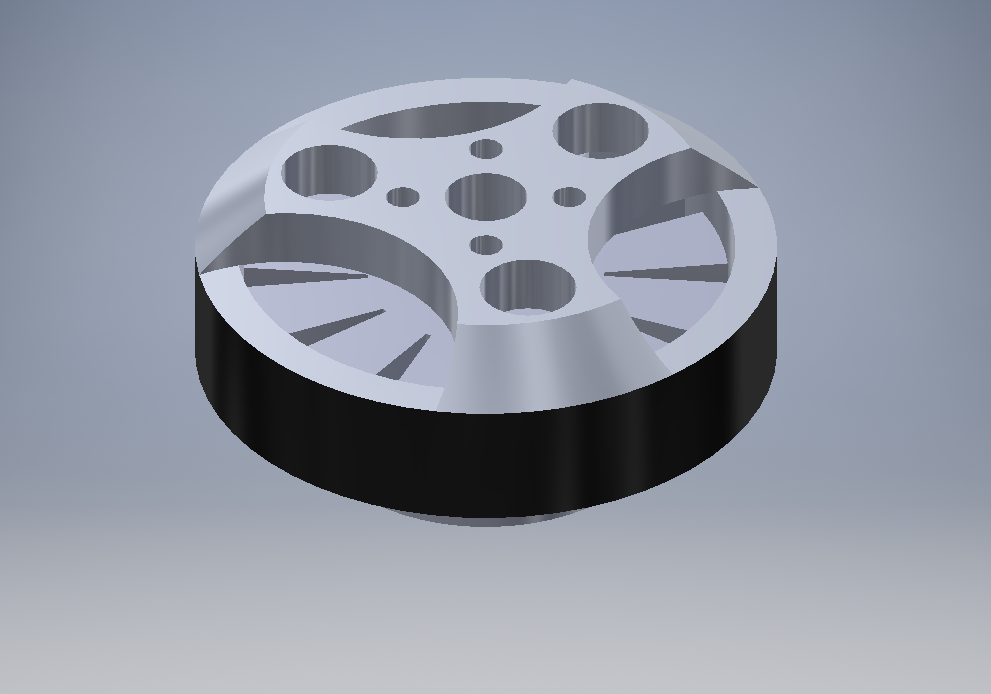
카메라 고정부, 첫번째 프레임, 두 번째 프레임, 지지부의 4가지 부분으로 모델링을 하였다.

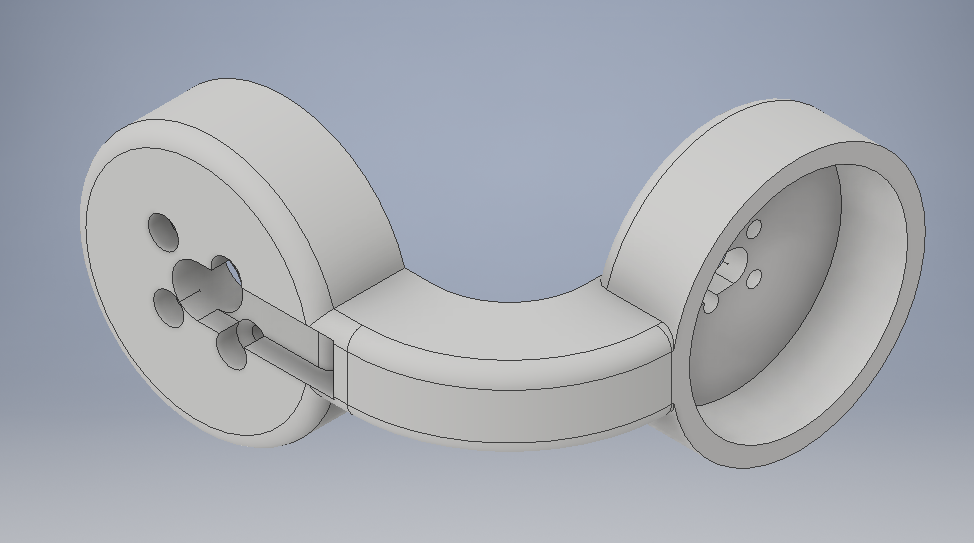


모터의 크기와 카메라의 크기를 모두 고려해서 모델링을 하였고, 각각의 부분을 조립하면 다음과 같은 형상이다.


두 번째 프레임과 지지부는 출력하여 모터 테스트에 이용하기로 하였다.
출력은 학교에 있는 3D 프린터를 이용하였다.
[사진 : 3D 프린팅]
출력된 각각의 부분과 조립된 형상은 다음과 같다.



프레임에는 모두 배선을 고려하여 모델링을 하였다.




'Project > Gimbal' 카테고리의 다른 글
| [액션캠 짐벌 제작] 07. 모터 컨트롤 (3) | 2019.06.09 |
|---|---|
| [액션캠 짐벌 제작] 05. 릴레이, MOSFET (0) | 2019.06.08 |
| [액션캠 짐벌 제작] 04. PWM, analogWrite() (0) | 2019.06.08 |
| [액션캠 짐벌 제작] 03. 제어기 선정 및 개발환경 구축 (0) | 2019.06.08 |
| [액션캠 짐벌 제작] 02. 모터 선정 (0) | 2019.06.08 |


